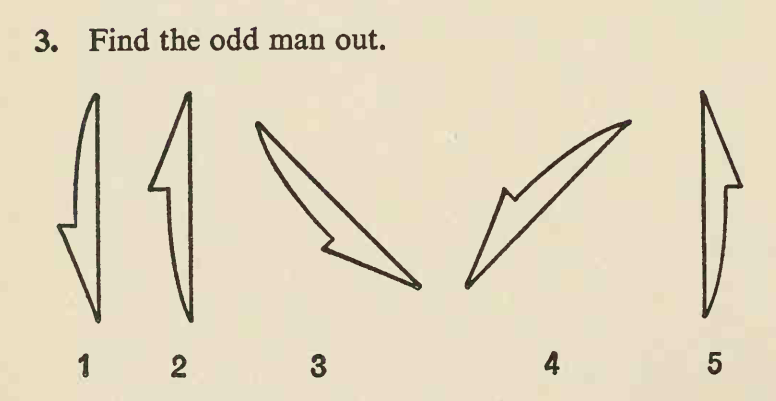
我参加了一次在线视觉智商测试,里面很多问题都是这样的:
这些图像的地址是:
[f"https://www.idrlabs.com/static/i/eysenck-iq/en/{i}.png" for i in range(1, 51)]
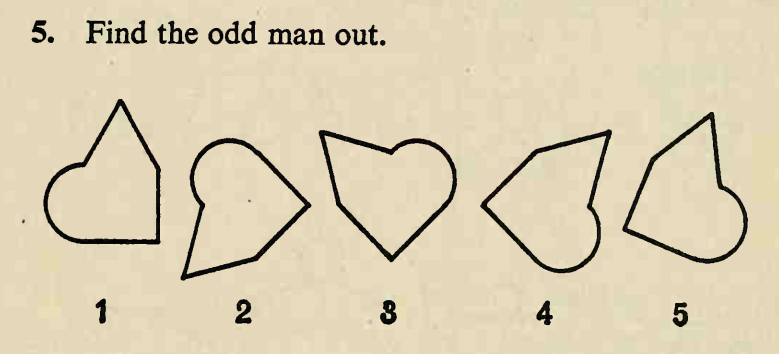
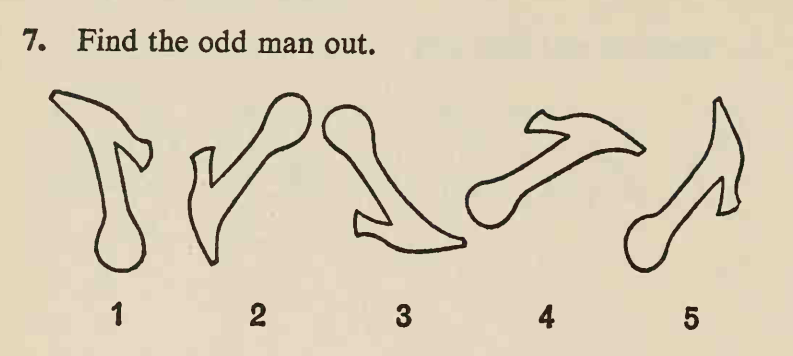
在这些图像中,有几个形状几乎相同,大小几乎相同.这些形状中的大多数都可以通过旋转和平移从其他形状中获得,但只有一种形状只能通过反射从其他形状中获得,这种形状具有与其他形状不同的手性,它是"奇数人".任务就是找到它.
这里的答案分别是2、1和4.我想把它自动化.
我差一点就成功了.
首先,我下载图像,并使用cv2加载它.
然后,我对图像进行阈值处理并反转数值,然后找出轮廓.然后我找出最大的等高线.
现在我需要提取与轮廓相关联的形状,并使形状直立.这就是我坚持的地方,我几乎成功了,但也有一些边缘情况.
我的 idea 很简单,找到轮廓的最小面积边界框,然后旋转图像使矩形竖直(所有边都平行于网格线,最长的边垂直),然后计算矩形的新坐标,最后使用数组切片提取形状.
我已经实现了我所描述的:
import cv2
import requests
import numpy as np
img = cv2.imdecode(
np.asarray(
bytearray(
requests.get(
"https://www.idrlabs.com/static/i/eysenck-iq/en/5.png"
).content,
),
dtype=np.uint8,
),
-1,
)
def get_contours(image):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
_, thresh = cv2.threshold(gray, 128, 255, 0)
thresh = ~thresh
contours, _ = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
return contours
def find_largest_areas(contours):
areas = [cv2.contourArea(contour) for contour in contours]
area_ranks = [(area, i) for i, area in enumerate(areas)]
area_ranks.sort(key=lambda x: -x[0])
for i in range(1, len(area_ranks)):
avg = sum(e[0] for e in area_ranks[:i]) / i
if area_ranks[i][0] < avg * 0.95:
break
return {e[1] for e in area_ranks[:i]}
def find_largest_shapes(image):
contours = get_contours(image)
area_ranks = find_largest_areas(contours)
contours = [e for i, e in enumerate(contours) if i in area_ranks]
rectangles = [cv2.minAreaRect(contour) for contour in contours]
rectangles.sort(key=lambda x: x[0])
return rectangles
def rotate_image(image, angle):
size_reverse = np.array(image.shape[1::-1])
M = cv2.getRotationMatrix2D(tuple(size_reverse / 2.0), angle, 1.0)
MM = np.absolute(M[:, :2])
size_new = MM @ size_reverse
M[:, -1] += (size_new - size_reverse) / 2.0
return cv2.warpAffine(image, M, tuple(size_new.astype(int)))
def int_sort(arr):
return np.sort(np.intp(np.floor(arr + 0.5)))
RADIANS = {}
def rotate(x, y, angle):
if pair := RADIANS.get(angle):
cosa, sina = pair
else:
a = angle / 180 * np.pi
cosa, sina = np.cos(a), np.sin(a)
RADIANS[angle] = (cosa, sina)
return x * cosa - y * sina, y * cosa + x * sina
def new_border(x, y, angle):
nx, ny = rotate(x, y, angle)
nx = int_sort(nx)
ny = int_sort(ny)
return nx[3] - nx[0], ny[3] - ny[0]
def coords_to_pixels(x, y, w, h):
cx, cy = w / 2, h / 2
nx, ny = x + cx, cy - y
nx, ny = int_sort(nx), int_sort(ny)
a, b = nx[0], ny[0]
return a, b, nx[3] - a, ny[3] - b
def new_contour_bounds(pixels, w, h, angle):
cx, cy = w / 2, h / 2
x = np.array([-cx, cx, cx, -cx])
y = np.array([cy, cy, -cy, -cy])
nw, nh = new_border(x, y, angle)
bx, by = pixels[..., 0] - cx, cy - pixels[..., 1]
nx, ny = rotate(bx, by, angle)
return coords_to_pixels(nx, ny, nw, nh)
def extract_shape(rectangle, image):
box = np.intp(np.floor(cv2.boxPoints(rectangle) + 0.5))
h, w = image.shape[:2]
angle = -rectangle[2]
x, y, dx, dy = new_contour_bounds(box, w, h, angle)
image = rotate_image(image, angle)
shape = image[y : y + dy, x : x + dx]
sh, sw = shape.shape[:2]
if sh < sw:
shape = np.rot90(shape)
return shape
rectangles = find_largest_shapes(img)
for rectangle in rectangles:
shape = extract_shape(rectangle, img)
cv2.imshow("", shape)
cv2.waitKeyEx(0)
但它并不是完美的:





正如你所看到的,它包括了边界矩形中的所有东西,而不仅仅是由轮廓限制的主形状,还有一些额外的部分突出.我希望形状只包含由轮廓限制的区域.
然后,更严重的问题是,不知何故,边界框并不总是与轮廓的主轴对齐,就像你在最后一张图像中看到的那样,它没有竖直,并且有黑色区域.
如何解决这些问题?





