- Python 物联网编程
 PDF电子书集合
PDF电子书集合
Python 使用伺服控制代码控制模拟设备详解
继续我们的旅程,将模拟仪表的优雅与数字数据的准确性结合起来,我们将看看我们在前两章学到的内容,并构建一个带有模拟仪表显示屏的物联网天气仪表板。
在开始本章之前,请确保已将第 5 章中使用 Python控制伺服的电路连接好。
此仪表板将根据室外温度和风速显示衣柜建议。我们还将在仪表板上使用 LED 指示灯,指示是否应随身携带雨伞。
本章将介绍以下主题:
要完成本章,您应该具备 Python 编程语言的实用知识。必须具备使用可连接组件的简单试验板的知识。
本项目中可使用乙烯基或工艺切割机。如何使用刀具的知识将是一项资产,这样你就可以完成这个项目。
到本章结束时,我们应该有一个工作物联网模拟天气仪表板。我们将修改第 4 章、订阅 Web 服务、第 5 章、用 Python控制伺服的代码,为我们的仪表盘提供数据。背景将被打印并剪掉。这个背景将给我们的仪表板一个卡通般的外观。
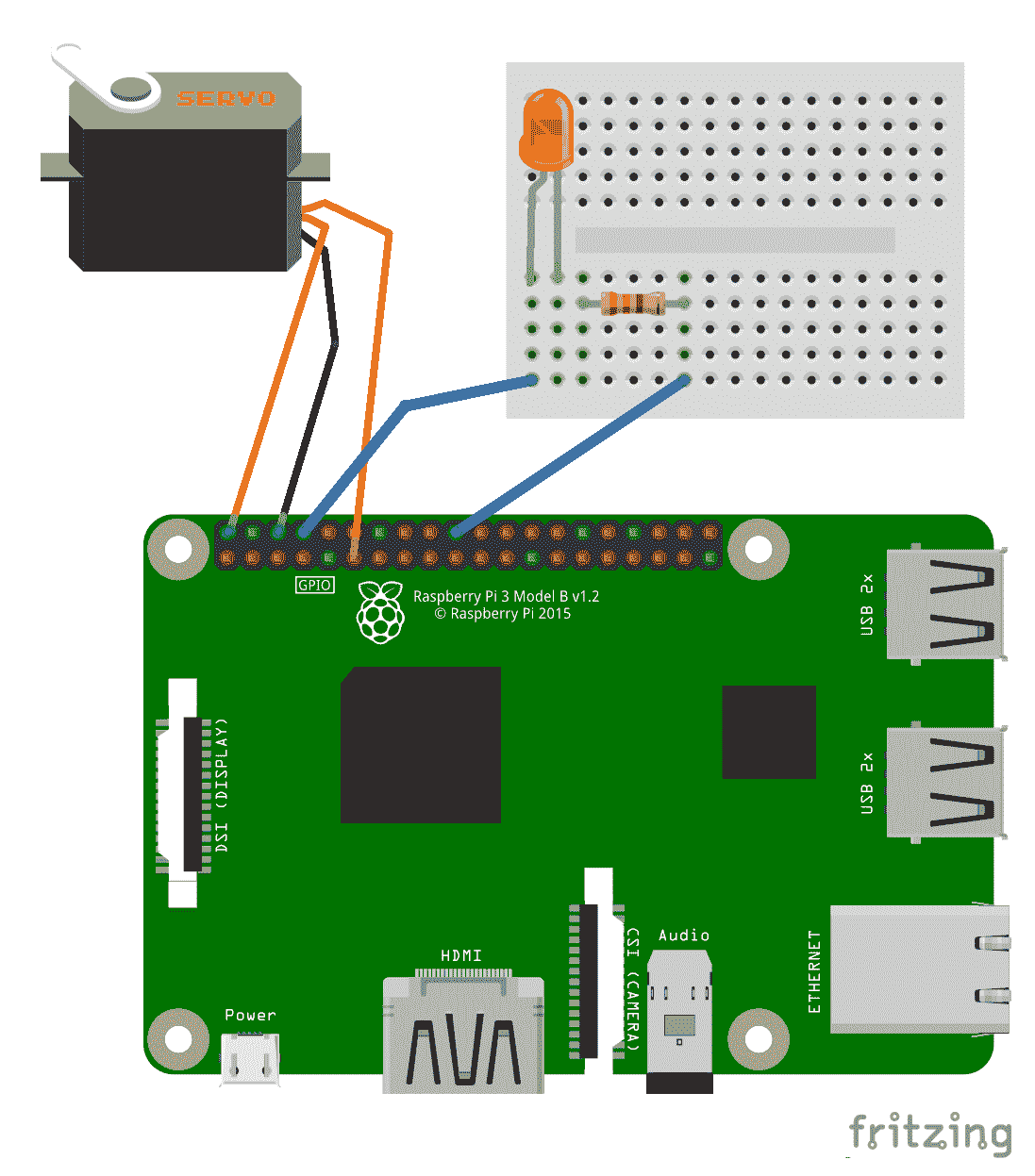
我们将使用第 5 章中的电路使用 Python控制伺服。以下是该电路的接线图:
这个项目需要一个下午才能完成。
为完成本项目,需要以下各项:
- Raspberry Pi 3 型(2015 型或更新型)
- USB 电源
- 计算机显示器
- USB 键盘
- USB 鼠标
- 小型伺服电动机
- LED(任何颜色)
- 试验板
- 用于试验板的跨接导线
- 彩色打印机
- 乙烯基或工艺切割机(可选)
在第 4 章订阅 Web 服务中,我们编写了一个 Python 程序来访问雅虎的天气数据!天气该程序中的类CurrentWeather返回了该类实例化时使用的city值的温度、天气条件和风速。
我们将重新访问该代码,并将类名更改为WeatherData。我们还将添加一个方法,从0-100返回一个值,以指示天气。在确定该数值时,我们将考虑温度和风速,0 表示极端冬季条件,100表示非常炎热的极端夏季条件。我们将使用这个数字来控制我们的伺服。我们还将检查是否下雨,并更新 LED 以指示是否需要雨伞:
-
从应用程序菜单|编程| Thonny Python IDE 打开 Thonny
-
单击新建图标创建一个新文件
-
在文件中键入以下内容:
from weather import Weather, Unit
class WeatherData:
temperature = 0
weather_conditions = ''
wind_speed = 0
city = ''
def __init__(self, city):
self.city = city
weather = Weather(unit = Unit.CELSIUS)
lookup = weather.lookup_by_location(self.city)
self.temperature = float(lookup.condition.temp)
self.weather_conditions = lookup.condition.text
self.wind_speed = float(lookup.wind.speed)
def getServoValue(self):
temp_factor = (self.temperature*100)/30
wind_factor = (self.wind_speed*100)/20
servo_value = temp_factor-(wind_factor/20)
if(servo_value >= 100):
return 100
elif (servo_value <= 0):
return 0
else:
return servo_value
def getLEDValue(self):
if (self.weather_conditions=='Thunderstorm'):
return 2;
elif(self.weather_conditions=='Raining'):
return 1
else:
return 0
if __name__=="__main__":
weather = WeatherData('Paris')
print(weather.getServoValue())
print(weather.getLEDValue())- 将文件另存为
WeatherData.py
我们代码的核心在于getServoValue()和getLEDValue()方法:
def getServoValue(self):
temp_factor = (self.temperature*100)/30
wind_factor = (self.wind_speed*100)/20
servo_value = temp_factor-(wind_factor/20)
if(servo_value >= 100):
return 100
elif (servo_value <= 0):
return 0
else:
return servo_value在getServoValue方法中,我们将temp_factor和wind_factor变量设置为一个百分比值,该百分比值基于两个变量的最小值0,以及温度和风速的最大值30和20。这些是任意数量的,我们将认为 T6 摄氏度是我们极端的热温度和 20 公里的风作为我们的极端风速。通过从温度中减去 5%的风速(除以20来设置伺服值)。当然,这也是武断的。您可以根据需要随意调整百分比。
temp_factor
wind_factor
servo_value
20
servo_value
然后我们返回servo_value的值,并使用它来控制伺服。任何低于0和高于100的值都将超出我们的范围,并且不会与我们的伺服一起工作(因为我们正在将伺服移动到0和100百分比之间)。我们在getServoValue方法中使用if语句来纠正这种情况。
getLEDValue方法只是检查天气状况,并根据是否下雨返回代码。Thunderstorm将返回2的值,Rain和Light Rain将返回1的值,其他任何内容都将返回0的值。如果有雷雨,我们将使用此值使仪表板中的 LED 闪烁;如果只是下雨,则将其保持稳定;在所有其他条件下,将其关闭:
def getLEDValue(self):
if (self.weather_conditions=='Thunderstorm'):
return 2;
elif(self.weather_conditions=='Rain'):
return 1
elif(self.weather_conditions=='Light Rain'):
return 1
else:
return 0Thunderstorm
Rain
Light Rain
if
if
用 Thonny 运行代码。您应该根据巴黎的天气条件获得伺服和 LED 的值。我在运行代码时收到以下信息:
73.075
0我们即将构建物联网天气仪表板。最后一步是根据雅虎返回的天气数据控制伺服位置!天气网络服务和物理建设的背景下,我们的伺服针。
正如你们中的一些人可能已经注意到的,你们的伺服电机并没有从最小到最大移动 180 度。这是由于 GPIO 零点设置的最小和最大脉冲宽度分别为 1 ms 和 2 ms。为了解释这种差异,我们必须在实例化一个Servo对象时相应地调整min_pulse_width和max_pulse_width属性。
下面的代码就是这样做的。变量servoCorrection对min_pulse_width和max_pulse_width值进行加和减。以下代码在5秒后将伺服移动到最小位置,然后移动到最大位置:
-
从应用程序菜单|编程| Thonny Python IDE 打开 Thonny。
-
单击新建图标创建一个新文件。
-
在文件中键入以下内容:
from gpiozero import Servo
from time import sleep
servoPin=17
servoCorrection=0.5
maxPW=(2.0+servoCorrection)/1000
minPW=(1.0-servoCorrection)/1000
servo=Servo(servoPin, min_pulse_width=minPW, max_pulse_width=maxPW)
servo.min()
sleep(5)
servo.max()
sleep(5)
servo.min()
sleep(5)
servo.max()
sleep(5)
servo.min()
sleep(5)
servo.max()
sleep(5)
servo.close()- 将文件另存为
servo_correction.py。 - 运行代码,查看
servoCorrection的值是否解决了伺服未从servo.min旋转 180 度到servo.max的问题。 - 调整
servoCorrection直到伺服在servo.min和servo.max之间移动 180 度。我们将在天气仪表板的代码中使用servoCorrection的值。
我们现在已经准备好根据天气条件控制伺服的位置。我们将修改在第 5 章中创建的WeatherDashboard类用 Python 控制伺服;要执行此操作,请执行以下步骤:
- 从应用程序菜单|编程| Thonny Python IDE 打开 Thonny
- 单击新建图标创建一个新文件
- 在文件中键入以下内容:
from gpiozero import Servo
from gpiozero import LED
from time import sleep
from WeatherData import WeatherData
class WeatherDashboard:
servo_pin = 17
led_pin = 14
servoCorrection=0.5
maxPW=(2.0+servoCorrection)/1000
minPW=(1.0-servoCorrection)/1000
def __init__(self, servo_position=0, led_status=0):
self.servo = Servo(self.servo_pin, min_pulse_width=
self.minPW, max_pulse_width=self.maxPW)
self.led = LED(self.led_pin)
self.move_servo(servo_position)
self.set_led_status(led_status)
def move_servo(self, servo_position=0):
self.servo.value = self.convert_percentage_to_integer(
servo_position)
def turnOffServo(self):
sleep(5)
self.servo.close()
def set_led_status(self, led_status=0):
if(led_status==0):
self.led.off()
elif (led_status==1):
self.led.on()
else:
self.led.blink()
def convert_percentage_to_integer(self, percentage_amount):
#adjust for servos that turn counter clockwise by default
adjusted_percentage_amount = 100 - percentage_amount
return (adjusted_percentage_amount*0.02)-1
if __name__=="__main__":
weather_data = WeatherData('Toronto')
weather_dashboard = WeatherDashboard(
weather_data.getServoValue(),
weather_data.getLEDValue())
weather_dashboard.turnOffServo()- 将文件另存为
WeatherDashboard.py - 运行代码并观察伺服位置是否发生变化
让我们看一下代码。
我们从导入我们需要的资源开始:
from time import sleep
from WeatherData import WeatherData我们将time添加到我们的项目中,因为我们将在关闭Servo对象之前将其用作延迟。增加WeatherData是为了根据天气情况为我们的伺服和 LED 提供数值。
servoCorrection、maxPW和minPW变量调整我们的伺服(如果需要),如我们之前的伺服校正代码所述:
servoCorrection=0.5
maxPW=(2.0+servoCorrection)/1000
minPW=(1.0-servoCorrection)/1000turnOffServo方法允许我们关闭与伺服的连接,停止可能发生的任何抖动运动:
def turnOffServo(self):
sleep(5)
self.servo.close()我们使用sleep功能延迟关闭伺服,使其在设置到其位置之前不会关闭。
您可能还注意到第 5 章中使用 Python控制伺服的代码对convert_percentage_to_integer方法进行了更改。本项目测试的电机在右侧有一个最小位置。这与我们需要的正好相反,因此代码被更改为从 100 中减去percentage_amount,以反转此行为并为我们提供正确的伺服位置(请参阅第 5 章、使用 Python 控制伺服、了解此方法的更多信息,并使用convert_percentage_to_integer根据本章(如需要):
def convert_percentage_to_integer(self, percentage_amount):
#adjust for servos that turn counter clockwise by default
adjusted_percentage_amount = 100 - percentage_amount
return (adjusted_percentage_amount*0.02)-1用 Thonny 运行代码。您应该看到伺服电机根据加拿大多伦多的天气条件移动到某个位置。根据运行代码时多伦多是否下雨,LED 将闪烁、保持稳定或熄灭。
现在,让我们通过为伺服和 LED 构建物理背景来增强我们的项目。
随着我们的代码的方式,现在是时候添加一个物理背景到我们的伺服。在此背景下,我们为我们的天气数据带来物联网。我们的仪表盘会根据天气情况建议我们应该穿哪种衣柜。
以下是我们将用于背景的图形:
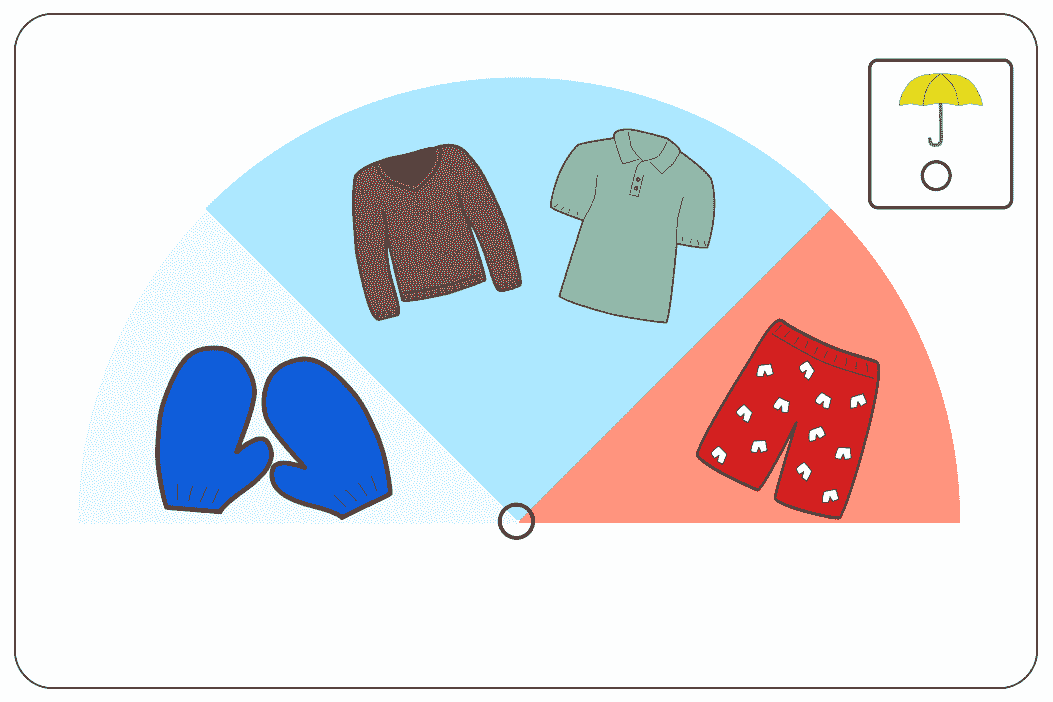
使用彩色打印机,在可打印的乙烯基上打印图形(此图像文件可从我们的 GitHub 存储库获得)。剪下伞下的孔和主图形。
要增加支撑,请使用切割器或用剪刀手动切割硬卡纸上的背板:

从可打印乙烯基片上剥下背景,并将其粘贴到背板上。使用孔将背景与背板对齐:
将 LED 插入伞下的孔中:

通过另一个孔插入伺服电机的轮毂。如有必要,使用双面泡沫胶带将伺服固定至背板:

使用跨接导线将 LED 和伺服连接到试验板(参见本章开头的接线图)。总成应稍微倾斜放置。在我们使用新显示器运行WeatherDashboard代码之前,我们必须将打捆针安装到最小位置:
- 从应用程序菜单|编程| Thonny Python IDE 打开 Thonny
- 单击新建图标创建一个新文件
- 在文件中键入以下内容:
from gpiozero import Servo
servoPin=17
servoCorrection=<<put in the correction you calculated>>
maxPW=(2.0+servoCorrection)/1000
minPW=(1.0-servoCorrection)/1000
servo=Servo(servoPin, min_pulse_width=minPW, max_pulse_width=maxPW)
servo.min()- 将文件另存为
servo_minimum.py - 运行代码,使伺服位置本身达到最小值
安装打捆针时,如果伺服电机逆时针转动至其最小值,则打捆针指向左侧;如果伺服电机顺时针转动至其最小值,则打捆针指向右侧(一旦开始实际操作伺服电机,这将更有意义)。
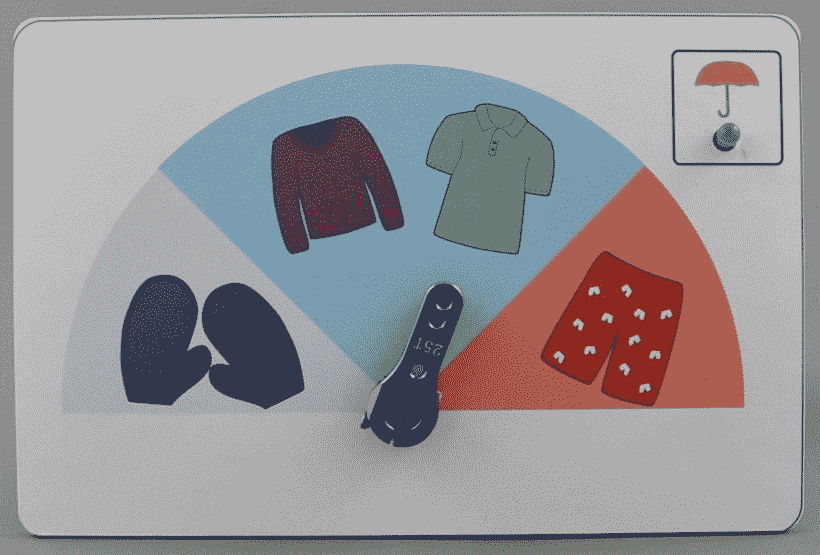
再次运行WeatherDashboard代码。伺服应根据天气数据移动,指示衣柜选项。如果下雨,LED 灯应该亮起。雷雨将使 LED 闪烁。否则,LED 将熄灭。
在下图中,仪表板推荐加拿大多伦多的短袖衬衫。室外天气条件下不需要雨伞:
祝贺您刚刚构建了一个物联网天气仪表板。
在这个项目中,我们使用树莓 Pi 的强大功能创建了一个物联网模拟天气仪表板。在这种情况下,这涉及一个互联网控制的伺服用作模拟仪表。不难想象我们会如何修改代码来显示除天气数据以外的数据。想象一个模拟仪表显示来自远方工厂的储罐液位,液位数据通过互联网传输
模拟仪表的直观特性使其非常适合只需一瞥数据的应用。将模拟仪表与来自互联网的数据相结合,创造了一个全新的数据显示世界。
在第 7 章中设置 Raspberry Pi Web 服务器中,我们将从模拟世界中走出一步,探索如何将 Raspberry Pi 用作 Web 服务器并构建基于 Web 的仪表板。
- 对还是错?伺服可以用作物联网设备。
- 对还是错?更改
Servo对象上的最小和最大脉冲宽度值会修改伺服范围。 - 为什么我们要在调用
Servo对象的close()方法之前添加延迟? - 对还是错?我们的
WeatherData类中不需要getTemperature()方法。 - 对还是错?仪表板上闪烁的 LED 指示晴朗无云的一天。
- 我们在仪表板上用一条短裤来表示什么?
- 在我们的代码中,您将在哪里使用正则表达式?
- 为什么我们要在代码中导入时间?
- 对还是错?启用物联网的伺服只能用于指示天气数据。
为了增强我们的代码,可以使用正则表达式。任何关于 Python 和正则表达式的文档对于培养强大的编码技能都是非常宝贵的。*