1.通信基本原理介绍
待写
2.三种通信方式的程序样例(python版)
2.1 topic 通信方式(非自定义和自定义)
2.1.1 创建工作空间和topic功能包
在ubuntu中打开命令行,输入下面的命令创建并初始化工作空间,一定要回到XXX_ws的目录下初始化工作空间
#创建工作空间文件夹my_ros(一般命名为XXX_ws)以及源程序目录src
$ mkdir -p ~/my_ros/src
#必须回到工作目录下,才开始初始化工作空间
$ cd ~/my_ros
#初始化工作空间,同时该命令还可以用于编译源代码
$ catkin_make
#进入src目录,创建自定义功能包
$ cd src
#创建功能包,指定了功能包的包名为"topic_test"
#引入的依赖有rospy(ros中python编程的必备接口),
#std_msgs(标准消息接口)和
#message_generation(用于自定义消息的接口)
$ catkin_create_pkg topic_test rospy std_msgs message_generation
#创建python源代码的目录,用于保存.py文件
$ mkdir script
主要运行的python程序分为两部分: 消息发布者(Publisher) 和 消息接受者(Subscriber) 由于此例中只使用到ros中提供的std_msgs中的String类型消息,所以对于初始化时自动生成的 CMakeList.txt 和 package.xml 无需修改
2.1.2 topic消息发布者(Publisher)部分
在终端中输入如下代码,开始编辑 消息发布者(Publisher) 的代码文件
#进入script目录
$ cd ~/my_ros/topic_test/script
#打开编辑器编辑代码,若文件不存在将会创建该文件
$ gedit Publisher.py
注:也可以使用 RoboWare/eclipse 等的IDE做开发
输入如下所示的python代码 ( 运行前需删掉中文注释,否则将会报错! )
#! /usr/bin/env python
# license removed for brevity
import rospy
from std_msgs.msg import String
def talker():
# 初始化节点,向ros操作系统的master节点注册自己的信息,
# 定义节点唯一的名称为publisher,同时保证名字唯一的参数(anonymous)为true
# 即,当名字重复时将会在名字后面添加一串随机数字作为注册名字,从而保证名字唯一
rospy.init_node('pyTalker',anonymous=True)
# 定义本节点将向
# ropy的 Publisher 类的构造方法介绍如下:
#__init__(self, name, data_class, subscriber_listener=None, tcp_nodelay=False, latch=False, headers=None, queue_size=None
# 其中 name (为str类型)代表本话题(topic)的名称
# data_class(message class) 为序列化的消息(message)类
# subscriber_listener(SubscribeListener) 指定订阅者,默认值为None,可以为空
# tcp_nodelay(bool) 为设置发布者(publisher)的socket是否采用Nagle算法(默认为False,即采用Nagle算法),通过该设置能够影响发布的效率\能耗
# latch(bool) 如果为真,最后一条消息将设置为"占用信道",即没一个订阅者都会立即收到该消息
# headers(dict) 默认为None,如果不为空,将使用传入的"字典"的键值作为未来连接的参数
# queue_size(int) 默认为None(阻塞式同步收发),指定消息队列的长度,必须指定,如果为0(无限缓冲区)是危险的,如果缓冲队长太大会导致发送不同步
# 该方法抛出 ROSException 异常
pub = rospy.Publisher('test_chat',String,queue_size=1)
# 设定循环的周期为0.1s
rate = rospy.Rate(10)
count = 0
while not rospy.is_shutdown():
words = 'Happy new year! %d' % count
# 发布消息的 Publisher类 的核心方法,参数如下:
# publish(self, *args, **kwds)
# args 要发送的消息,如果有 keyword 时可以为空
# kwds 消息的关键词,如果 kwds 被采用,则 args 一定是未指定的
pub.publish(words)
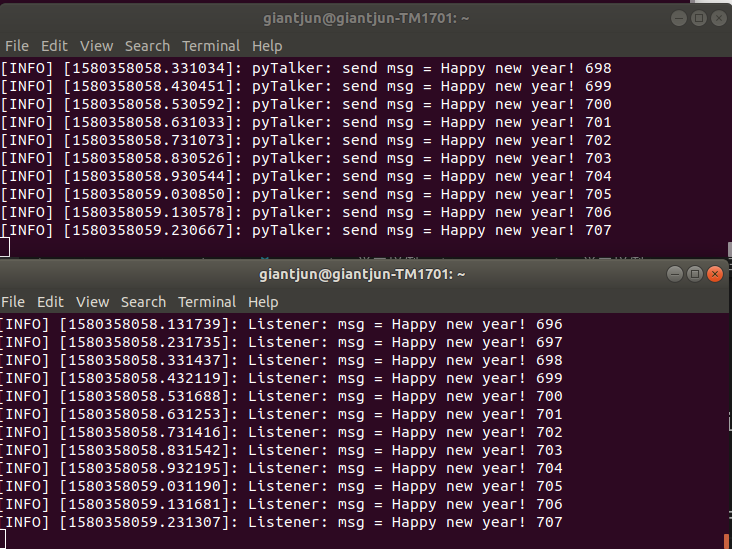
rospy.loginfo('pyTalker: send msg = %s ',words)
count = count+1
pub.publish(words)
rate.sleep()
# 进行标准的Python_main检查,这里的try-except捕获rospy.ROSInterruptException异常(处理异常中断)
if __name__== '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
2.1.3 topic消息接收者(Subscriber)部分
同理创建 消息接受者(Subscriber) 的代码文件
#打开编辑器编辑代码,若文件不存在将会创建该文件
$ gedit Subscriber.py
输入如下代码 ( 运行代码前需将中文注释都删掉,否则会出错! )
#! /usr/bin/env python
# license removed for brevity
import rospy
from std_msgs.msg import String
# 用于处理从指定topic获取的消息,尤其需要注意"message.data"这样使用,才能正确获取全部消息
def callback(message):
rospy.loginfo('Listener: msg = %s',message.data)
# 主调用的方法,负责向主服务器注册本节点,以及注册,链接,使用指定话题
def listener():
# 向服务器注册本节点名为'pyListener',允许使用避免重名的机制(若重复,则在名字后加随机数)
rospy.init_node('pyListener',anonymous=True)
# 向服务器申请获得含有指定的'test_chat'的topic发布者的地址,并连接
# 该方法的参数中,'test_chat'为本节点需要链接的话题(topic)名,'String'为获取的消息的类型
# 'callback'为处理消息的方法名
rospy.Subscriber('test_chat',String,callback)
# 以下的spin()方法为ROS消息回调处理函数,调用后将不会返回(下面的程序无法执行),即阻塞本线程(使得本节点不能再执行其他操作,只能处理消息)
# 与这个函数相近功能的函数有spinOnce(),但spinOnce()会返回(下面的程序仍能执行)且只执行一次,不会阻塞本线程
rospy.spin()
# 进行标准的Python_main检查
if __name__== '__main__':
listener()
2.1.3 编译并运行代码
打开一个终端,输入如下命令
#进入工作空间目录
$ cd ~/my_ros
#编译程序(实际上python为脚本语言无需编译)
$ catkin_make
这里所说的 " 编译 " 并不是严格意义上的 " 编译 ",可以理解为是为ros运行做好准备(例如catkin的操作).执行过该命令后,修改.py文件后再运行将会出现修改后的结果 (无需再catkin_make一次)
开三个终端,分别输入如下3条命令,开始执行程序
#开启服务器,将负责处理注册/连接请求等
$ roscore
#开始运行topic_test功能包下的 消息发送者(Publisher) 节点
$ rosrun topic_test Publisher.py
#运行topic_test包下的 消息接收者(Subscriber)节点
$ rosrun topic_test Subscriber.py
如果是完全按照上面的步骤操作,如果过遇到程序无法执行/报错,显示:
可能原因是python文件没有执行权限,输入如下命令赋予权限就可以运行了
#必须在.py文件的目录下
$ cd ~/my_ros/script
#赋予运行权限
$ chmod +x Publisher.py
$ chmod +x Subscriber.py
程序运行结果为
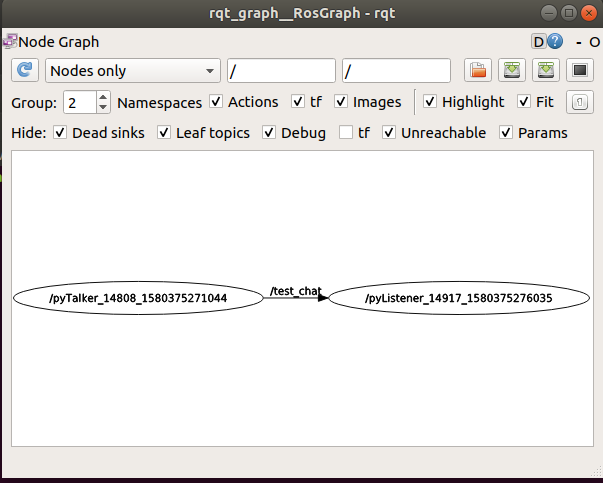
在新的终端输入如下命令,打开rqt工具,可以看到各个节点之间的关系
$ rqt_graph
2.1.4 自定义消息
自定义消息的使用与使用ros提供的消息一样,不过有几个部分需要注意:
- 需自定义.msg文件
- 在package.xml中添加build_depend和exec_depend
- 在CMakeList.txt中,添加有关.msg文件的依赖包和说明
注: 如果是使用 Roboware,使用"右键->add Msg Folder"或"右键->add Msg File"将会自动修改package.xml和CMakeList.txt文件
a.自定义.msg文件
#在包中创建msg文件夹,专门用来存放.msg文件,并开始编辑Hello.msg文件
$ mkdir ~/my_ros/topic_test/msg
$ gedit ~/my_ros/topic_test/msg/Hello.msg
在编辑器中输入(类型+属性名)
String message
int32 index
b.修改 package.xml
为了能够使ros生成我们需要的python/c++的消息代码,我们需要在功能包中添加message_generation依赖,在package.xml文件中添加如下两行代码:
<build_depend>message_generation</bulid_depend>
<exec_depend>message_generation</exec_depend>
c.修改 CMakeList.txt
(1)在find_package()中添加message_generation,作用是让catkin在编译时链接message_generation功能包,修改后为:
find_package(catkin REQUIRED COMPONENTS
message_generation
rospy
std_msgs
)
(2)在add_message_files()中添加Hello.msg. 作用是向catkin指明需要用到的.msg文件包含Hello.msg
add_message_files(FILES
Hello.msg
)
(3)去掉generate_messages()的注释
(4)在catkin_package()中添加message_runtime
catkin_package(
CATKIN_DEPENDS
message_runtime
)
d.修改消息发送者文件 (Publisher.py)
#! /usr/bin/env python
# license removed for brevity
import rospy
from topic_test.msg import Hello
def talker():
rospy.init_node('pyTalker',anonymous=True)
pub = rospy.Publisher('test_chat',Hello,queue_size=1)
rate = rospy.Rate(10)
count = 0
while not rospy.is_shutdown():
greeting = Hello()
greeting.index = count
greeting.message = 'Happy new year!'
pub.publish(greeting)
rospy.loginfo('pyTalker: send msg = %s',greeting.message)
rospy.loginfo('pyTalker: send index = %d',greeting.index)
count = count+1
rate.sleep()
if __name__== '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
e.修改消息接收者文件 (Subscriber.py)
#! /usr/bin/env python
# license removed for brevity
import rospy
from topic_test.msg import Hello
def callback(message):
rospy.loginfo('pyListener: msg = %s' % message.message)
rospy.loginfo('pyListener: index = %d' % message.index)
def listener():
rospy.init_node('pyListener',anonymous=True)
rospy.Subscriber('test_chat',Hello,callback)
rospy.spin()
if __name__== '__main__':
listener()
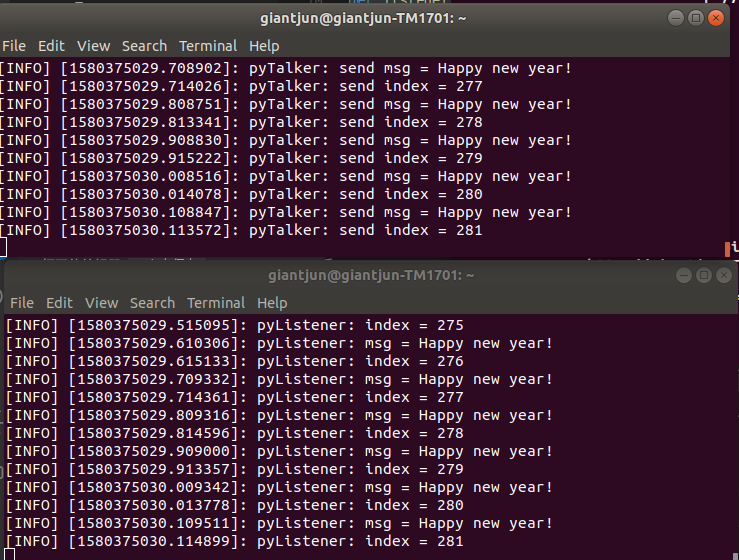
f .运行程序
按照上面的操作,先到工作空间目录下, catkin_make 一下,然后再输入命令运行
运行结果为:
2.2 service 通信方式(自定义)
这里的小demo实现的功能是,由 客户端( client ) 向 服务器端( server ) 发送一条消息,消息里包含两个参数 a 和 b , 服务器端( server ) 收到这两个参数后,将他们相加后返回.
由于已经有了之前的基础,这里就不再展示完整操作了,只展示使用的核心部分,比较基础的读者可以自行查看 2.1 中的例子 .
完整的基本步骤如下:
- 创建 service_test 功能包(与上例 2.1 一样)
- 创建自定义的.srv文件
- 修改 CMakeList.txt 和 package.xml
- 新建script文件夹,并编写 server.py 和 client.py
- 编译并运行
2.2.1 自定义.srv文件
在srv文件夹中,前两行为要传送的参数,"---"后的一行为返回的参数
int64 a
int64 b
---
int64 result
2.2.2 编写服务器端(server)部分代码
如下为服务器端(server.py)部分代码
#!/usr/bin/env python
import rospy
from service_test.srv import Sum
def handle(req):
rospy.loginfo("Successful recieved number %s and %s" % (req.a,req.b))
rospy.loginfo("Sending result: %s" % (req.a+req.b))
# 有些资料和官方文档个上写,这里应该return的是"SumResponse(req.a+req.b)",但实际运行时不知道为什么会出错,改为直接返回结果后程序正常运行.
return req.a+req.b
def server():
rospy.init_node("sum_server")
# 向master节点注册为service,
# 这个service的名字为"pyServer_Client"
# 传送消息类为Sum
# 处理函数的函数名为handle
rospy.Service("pyServer_Client",Sum,handle)
rospy.loginfo("Ready to recieve and handle request:")
# 消息回调处理函数,将阻塞本线程
rospy.spin()
if __name__== "__main__":
server()
2.2.3 编写客户端(client)部分代码
如下为客户端(client.py)部分代码
#!/usr/bin/env python
import sys
import rospy
from service_test.srv import Sum
def client(x,y):
rospy.init_node("pyClient")
# 等待名为"pyServer_Client"的service空闲,当其空闲/可用时程序继续执行
rospy.wait_for_service("pyServer_Client")
try:
# 向master节点注册为客户端,
# 申请链接的service名为"pyServer_Client",
# 消息类为Sum
pyServer_Client = rospy.ServiceProxy("pyServer_Client",Sum)
# 向服务器发送请求,该请求包含2个参数
resp = pyServer_Client.call(x,y)
# 返回得到Sum.srv里result字段的加法运算结果
return resp.result
except rospy.ServiceException, e:
rospy.logwarn("Service call failed ! %s! " % e)
if __name__== "__main__":
if len(sys.argv) == 3:
# 获取输入的两个参数
x = int(sys.argv[1])
y = int(sys.argv[2])
else:
rospy.logwarn("The parameters inputed count is not right! ")
sys.exit(1)
rospy.loginfo("pyClient : Requesting %s + %s" % (x,y))
rospy.loginfo("pyClient : The Result is %s" % client(x,y))
2.2.4 修改CMakeList.txt文件
修改的地方与2.1.4 c 中修改CMakeList.txt文件大致相同,只是将2.1.4 c(2) 中需要修改"add_message_file"的部分,改为修改"add_service_file"
由于此次使用的是.srv文件,而不是.msg文件,所以catkin应该处理的是我们自定义的.srv文件.
我们需要将"add_message_file"部分注释掉,修改"add_service_file"部分为:
add_service_files(FILES
Sum.srv
)
2.2.5 修改package.xml文件
这部分与2.1.4 (topic自定义msg的例子)中修改package.xml的一样
2.2.6 运行service_test程序
运行需要的命令与前面提到的相同
$ cd ~/my_ros/src/service_test/script
$ chmod +x server.py
$ chmod +x client.py
$ roscore
$ rosrun service_test server.py
#这里传入了连个参数1和3
$ rosrun service_test client.py 1 3
程序运行情况为:

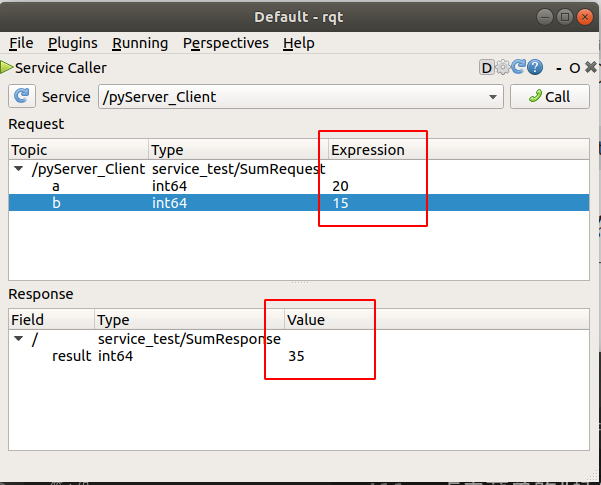
当然,运行server.py节点后,可以通过rqt的图形界面工具发送处理请求,这就不需要客户端(client.py)了.在新终端中输入
$ rqt
点击菜单的"插件[Plugins]->[Service]->[Service Call]"就可以得到下面的界面
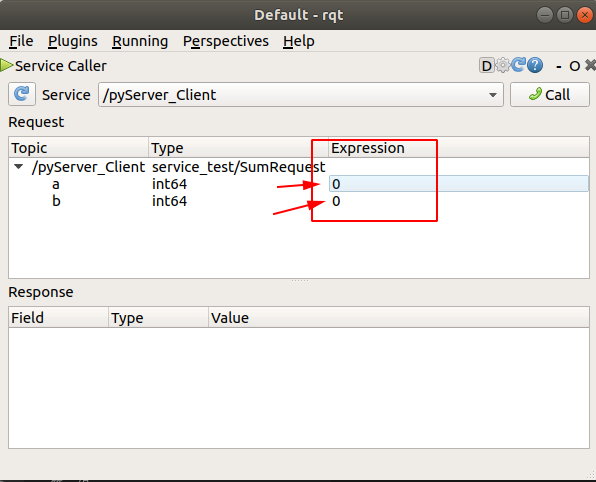
修改如上图箭头指向的地方为自己想传入的参数,点击"Call"可以得到服务器端返回的结果
2.3 action通信方式(不完整)
这里实现的例子是输入3个数,计算3个数的乘积作为最终结果,中间反馈结果为第1个数和第2个数的成绩(中间结果) 完整的基本步骤如下:
- 创建 action_test 功能包
- 创建自定义的.action文件
- 修改 CMakeList.txt 和 package.xml
- 新建script文件夹,并编写 action_server.py 和 action_client.py
- 编译并运行
action_server部分可参考: http://wiki.ros.org/actionlib_tutorials/Tutorials/Writing a Simple Action Server using the Execute Callback (Python) action_client部分可参考: http://wiki.ros.org/actionlib_tutorials/Tutorials/Writing a Simple Action Client (Python)
2.3.1 创建 action_test功能包
$ catkin_create_pkg action_test rospy actionlib actionlib_msgs std_msgs message_generation
2.3.2 创建自定义 .action文件
在 action_test 目录下创建 action 文件夹后,新建 multiply.action 文件,输入如下内容:
#a,b为定义的两个输入参数(goal definition)
int32 a
int32 b
---
#final_result为定义的最终结果(result definition)
int32 final_result
---
#in_result为定义的中间反馈结果(feedback)
int32 in_result
实际上动作(.action)可以包含5中基本消息:目标(goal),结果(result),反馈(feedback),取消(cancel),状态(status). 本例中未涉及的取消(cancel)消息使用actionlib_msgs/GoalID,作用是在动作运行时取消客户端和单独节点上的动作的执行. 状态(status)消息可以根据状态转换(如PENDING,ACTIVE,PREEMPTED和SUCCEEDED)检查当前动作的状态
2.3.3 修改 CMakeList.txt 和 package.xml 文件
package.xml中的内容实际上在指定依赖,创建功能包的时候,已经修改好了,所以不需要修改
CMakeList.txt的内容,如果是使用Roboware创建action Folder,action File,那么这一部分也不需要修改,因为已经修改好了.要修改的地方主要是如下所示的地方:
add_action_files(FILES
multiply.action
)
2.3.4 编写action_server服务器端部分程序
后面再补充,可参考前面的链接
2.3.5 编写action_client客户端部分程序
后面再补充,可参考前面的链接
2.3.6 编译并运行程序
后面再补充,可参考前面的链接