- Python 物联网入门手册
 PDF电子书集合
PDF电子书集合
Python 用 Jarvis 识别人类详解
到目前为止,我们已经在上一章中了解了如何将多层条件组合在一起,以获得所需的功能。我们刚刚完成了让 Jarvis 为您服务的第一步。现在,是时候让它更有能力了。
在本章中,我们将使它能够控制您家中的更多电子设备,这些电子设备可以在您不告诉系统任何信息的情况下自动控制。因此,毫不拖延,让我们直接开始,看看我们的桶里有什么。
智能家居的一个基本功能是,无论何时,只要你在身边,就可以为你打开电灯。这是任何系统都能为您做的最基本的事情之一。我们会在你一进屋就开灯,然后我们会让系统越来越智能化。
所以,我们需要做的第一件事是识别你是否在房间里。有多种方法可以做到这一点。生命的一个重要特征是运动的存在。你可能会说植物不会动,它们会动;他们长大了,不是吗?因此,检测运动是检测是否有人在场的关键一步!
这一步对您来说并不困难,因为我们之前已经连接了该传感器。我们谈论的是好的老式 PIR 传感器。因此,传感器将感应该区域内的任何移动。如果有任何移动,Jarvis 将打开灯。我相信这是你现在可以自己做的事情。您仍然可以在此处参考代码和电路图:
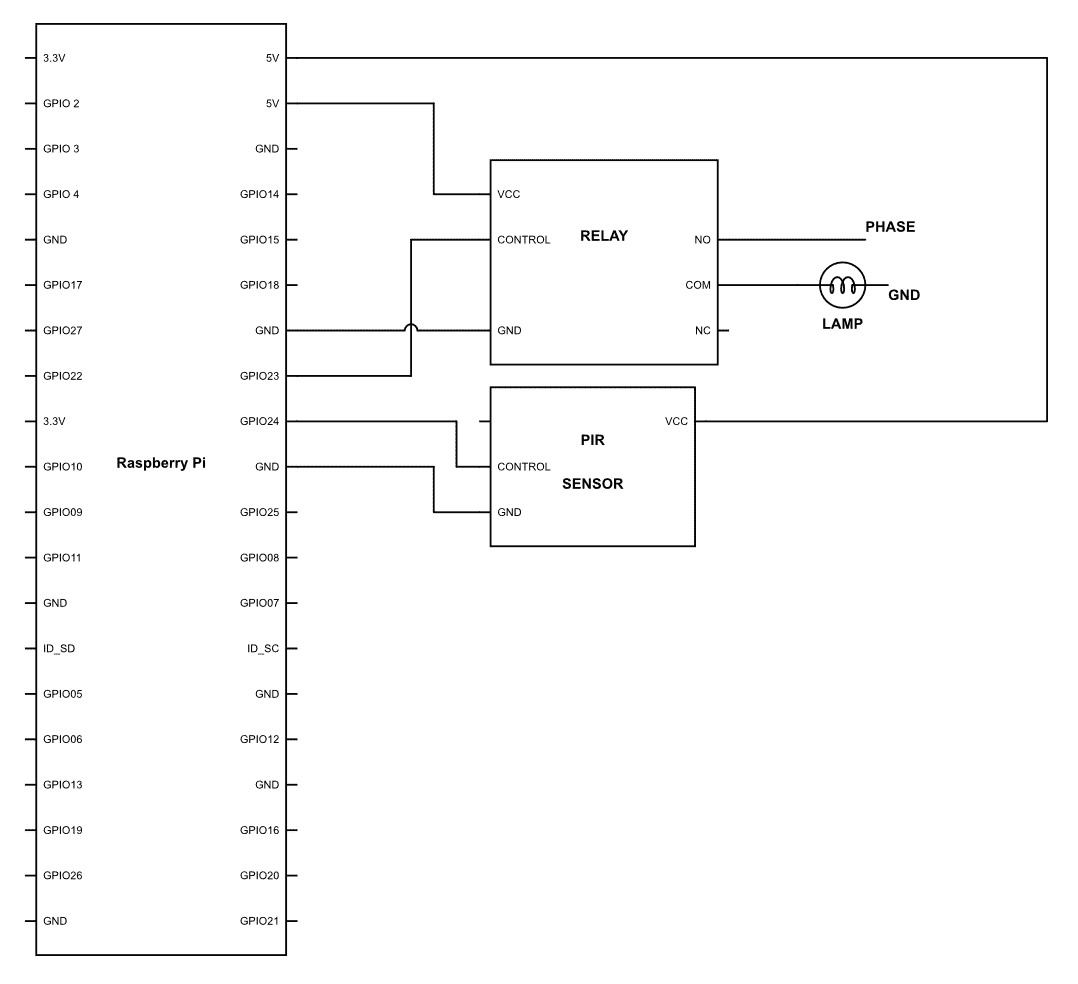
现在上传以下代码:
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
PIR = 24
LIGHT = 23
GPIO.setup(DOPPLER,GPIO.IN)
GPIO.setup(BUZZER,GPIO.OUT)
While True:
if GPIO.input(PIR) == 1:
GPIO.output(LIGHT,GPIO.HIGH)
if GPIO.input(PIR) == 0:
GPIO.output(LIGHT,GPIO.LOW)在前面的代码中,我们只是在检测到运动后立即打开灯光,但问题是它只会在运动存在时打开灯光。这是什么意思?简单,当有一些运动时,它将保持灯亮,一旦运动停止,它将关闭灯。
对于想减肥的人来说,这可能是一个非常好的代码,但对我们大多数人来说,这将是一个恼人的代码。因此,让我们包含一个小循环,我们在前一章中使用了它,并使其更好一些:
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
PIR = 24
LIGHT = 23
TIME = 5
GPIO.setup(PIR,GPIO.IN)
GPIO.setup(BUZZER,GPIO.OUT)
While True:
If GPIO.input(PIR) == 1:
M = datetime.datetime.now().strftime('%M')
M_final= M + TIME
for M < M_final:
GPIO.output(LIGHT,GPIO.HIGH)
M = datetime.datetime.now().strftime('%M')
if GPIO.input(PIR) == 1:
M_final = M_final + 1
if GPIO.input(PIR) = 0:
GPIO.output(LIGHT, GPIO.LOW)}
因此,在这个程序中,我们所做的只是添加了一个for循环,它在一定时间内打开灯。可以通过更改变量TIME的值来切换该时间的长短。
该循环中还有一个有趣的部分,如下所示:
if GPIO.input(PIR) == 1
M_final = M_final + 1 你可能会想,我们为什么要这样做?无论何时打开灯,它都将保持打开 5 分钟。然后,它将关闭并等待移动发生。因此,本质上,这个代码的问题是,如果你在房间里,灯打开,那么 5 分钟内,它将看到是否检测到任何运动。当它在 5 分钟后搜索运动时,您有可能处于运动状态。但在大多数情况下,情况并非如此。因此,我们使用 PIR 传感器检测运动。无论何时检测到移动,M_final的值都会使用M_final = M_final + 1行递增,从而增加灯光打开的时间。
到现在为止,你一定已经明白了,PIR 传感器并不是我们打开或关闭灯的最理想的传感器。主要是因为,尽管运动是存在的最佳指示器之一,但有时你可能根本不动,例如,在休息、看书、看电影等时。
我们现在该怎么办?好吧,我们可以玩个小把戏。还记得在上一章中,我们使用接近传感器来检测一个人是否穿越了特定区域吗?我们将在这里植入类似的逻辑;但是,我们将改进代码,使其更好,而不仅仅是复制粘贴代码。
因此,我们将使用其中两种传感器,而不是使用单个红外接近传感器。安装如下图所示:
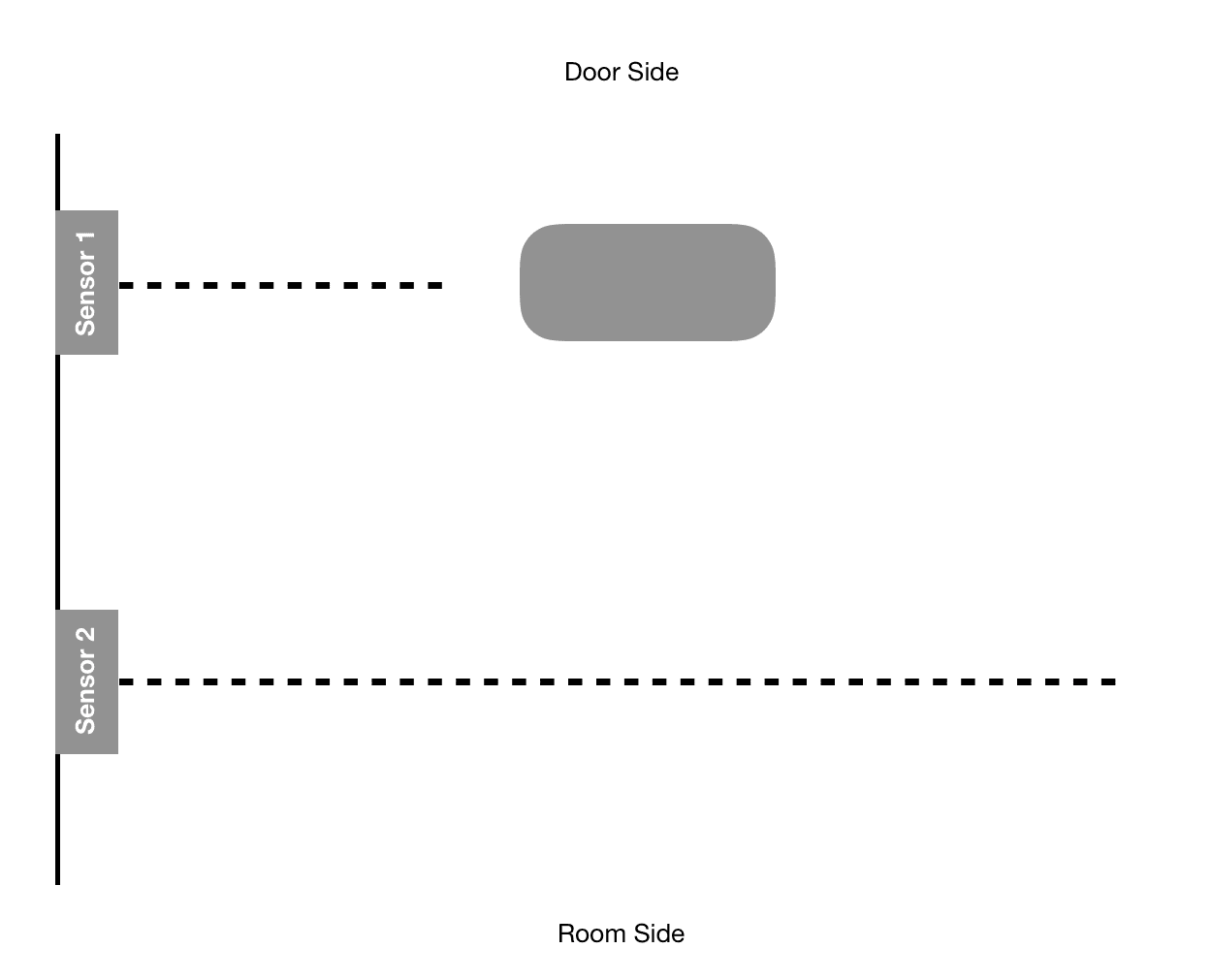
现在很明显,每当有人从门侧走到房间侧,传感器 1在检测到尸体时会显示较低的读数。然后,当他走向房间一侧时,传感器 2将显示类似的读数。
如果第一个传感器 1被触发,然后传感器 2被触发,那么我们可以安全地假设该人员正在从门侧移动到房间侧。类似地,如果发生了相反的情况,则可以理解该人正在走出房间。
现在,这相当简单。但我们如何在现实生活中实施它呢?首先,我们需要按如下方式连接电路:
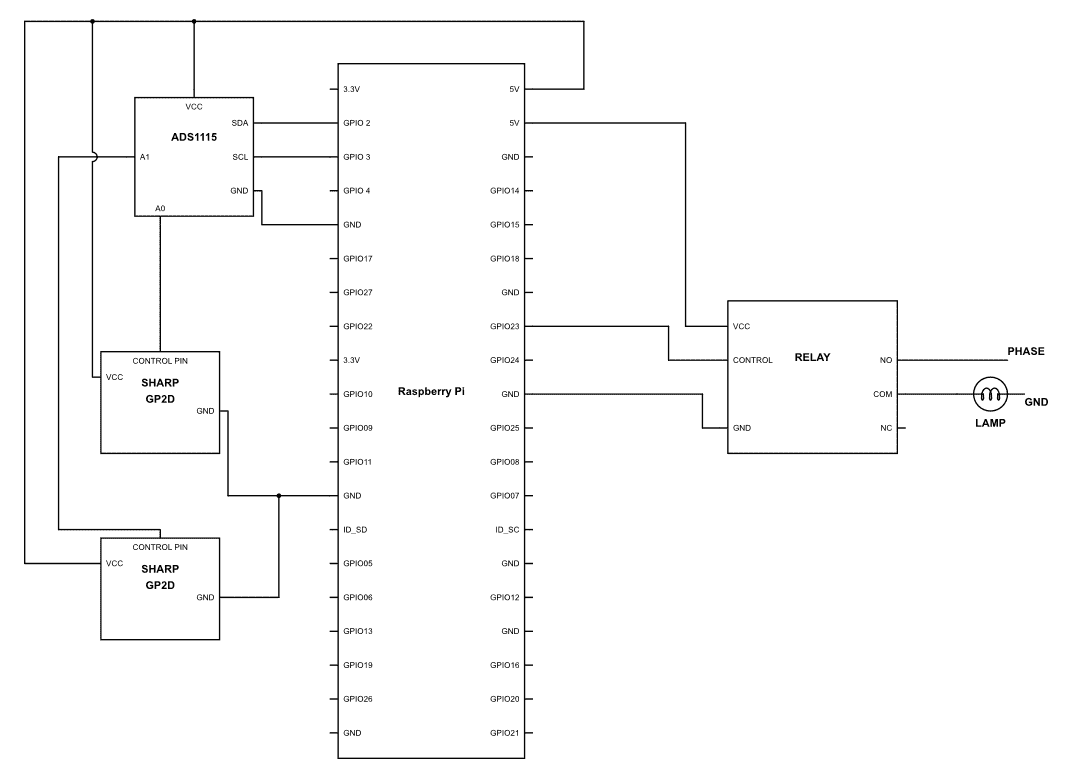
完成后,上传以下代码:
import GPIO library
import RPi.GPIO as GPIO
import time
import Adafruit_ADS1x15
adc0 = Adafruit_ADS1x15.ADS1115()
GAIN = 1
LIGHT = 23
adc0.start_adc(0, gain=GAIN)
adc1.start_adc(1, gain=GAIN)
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
while True:
F_value = adc0.get_last_result()
F1 = (1.0 / (F_value / 13.15)) - 0.35
time.sleep(0.1)
F_value = adc0.get_last_result()
F2 = (1.0 / (F_value / 13.15)) - 0.35
F0_final = F1-F2
if F0 > 10 :
Time0 = time.time()
F_value = adc1.get_last_result()
F1 = (1.0 / (F_value / 13.15)) - 0.35
time.sleep(0.1)
F_value = adc1.get_last_result()
F2 = (1.0 / (F_value / 13.15)) - 0.35
F1_final = F1-F2
if F1 > 10:
Time1 = time.time()
if Time1 > Time0:
GPIO.output(LIGHT, GPIO.HIGH)
if Time1 < Time0:
GPIO.output(LIGHT, GPIO.LOW) }现在,让我们看看我们在这里做什么。和往常一样,大多数语法都非常简单明了。最重要的部分是逻辑。因此,让我们以适当的步骤了解我们正在做什么。
F_value = adc0.get_last_result()
F1 = (1.0 / (F_value / 13.15)) - 0.35
time.sleep(0.1)
F_value = adc0.get_last_result()
F2 = (1.0 / (F_value / 13.15)) - 0.35在前面的代码行中,我们获取红外接近传感器的值,计算与其对应的距离,并将该值存储在一个名为F1的变量中。完成后,我们将使用time.sleep(0.1)功能暂停0.1秒。此后,我们再次读取同一传感器的读数,并将该值存储在名为F2的变量中。我们为什么要这样做?我们在前面的章节中已经理解了这一点。
F0_final = F1-F2一旦获得了F1和F0的值,我们将计算差值,以确定是否有人通过了它。如果没有人通过,那么读数将几乎相同,差异也不会很大。但是,如果一个人通过了测试,那么读数将相当可观,该值将存储在一个名为F0_final的变量中。
if F0 > 10 :
Time0 = time.time()如果F0值或第一次和第二次读数之间的距离差大于 10 厘米,则if条件为真。一旦为真,它会将Time0变量的值设置为时间的当前值。time.time()功能将记录准确的时间
F_value = adc1.get_last_result()
F1 = (1.0 / (F_value / 13.15)) - 0.35
time.sleep(0.1)
F_value = adc1.get_last_result()
F2 = (1.0 / (F_value / 13.15)) - 0.35
F1_final = F1-F2
if F1 > 10:
Time1 = time.time()现在,我们将对传感器 2执行完全相同的步骤。这里没有什么新鲜事要说;这是不言自明的。
if Time1 > Time0:
GPIO.output(LIGHT, GPIO.HIGH)完成所有这些之后,我们比较if Time1 > Time0。我们为什么要比较呢?因为Time0是传感器 1记录的时间。如果该人员正在内部移动,则首先触发传感器 1,然后触发传感器 2。因此,传感器 2记录的时间会更长,而传感器 1记录的时间会更早。如果发生这种情况,那么我们可以假设这个人正在进来。如果有人进来,我们只需要打开灯,这正是我们在做的
if Time1 < Time0:
GPIO.output(LIGHT, GPIO.LOW)同样,当一个人外出时,第一个被触发的传感器是传感器 2,之后会触发传感器 1。使Time1标注的时间早于Time2;因此,只要这种情况是真的,我们就会知道这个人正在搬出房间,灯可以关掉。
继续,把它安装在门附近,看看它的反应如何。我相信这将比我们通过 PIR 所做的要好得多。享受它的乐趣,并尝试找出它可能存在的任何缺陷
您能在以前的代码中找到任何缺陷吗?他们不难找到;当房间里只有一个人的时候,代码工作得非常出色。如果安装在多人来来往往的地方,那么可能会很有挑战性。这是因为每当有人外出时,灯都会熄灭。
现在问题已经很明显了,是时候让代码变得更好了。为此,硬件将保持完全相同;我们只需要让代码更智能。让我们看看如何做到这一点:
import GPIO library
import RPi.GPIO as GPIO
import time
import time
import Adafruit_ADS1x15
adc0 = Adafruit_ADS1x15.ADS1115()
GAIN = 1
adc0.start_adc(0, gain=GAIN)
adc1.start_adc(1, gain=GAIN)
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
PCount = 0
while True:
F_value = adc0.get_last_result()
F1 = (1.0 / (F_value / 13.15)) - 0.35
time.sleep(0.1)
F_value = adc0.get_last_result()
F2 = (1.0 / (F_value / 13.15)) - 0.35
F0_final = F1-F2
if F0 > 10 :
Time0 = time.time()
F_value = adc1.get_last_result()
F1 = (1.0 / (F_value / 13.15)) - 0.35
time.sleep(0.1)
F_value = adc1.get_last_result()
F2 = (1.0 / (F_value / 13.15)) - 0.35
F1_final = F1-F2
if F1 > 10:
Time1 = time.time()
if Time1 > Time0:
PCount = PCount + 1
if Time1 < Time0:
PCount = PCount - 1
if PCount > 0:
GPIO.output(LIGHT, GPIO.HIGH)
else if PCount = 0:
GPIO.output(LIGHT, GPIO.LOW) 我们所做的是一些非常基本的事情。我们已经声明了一个名为PCount的变量。声明此变量是为了统计房间或家中的人数。正如您在代码的前几行中所看到的,我们已经将PCount的值声明为0。我们假设,一旦我们开始这样做,里面的人数将是0
if Time1 > Time0:
PCount = PCount + 1当满足条件if Time1 > Time0:时,PCount值增加1。众所周知,只有当一个人在家里行走时,这种情况才会出现。
if Time1 < Time0:
PCount = PCount - 1同样,当一个人在室外行走时,条件if Time1 < Time0:为真;每当发生这种情况时,PCount的值就会减少1
if PCount > 0:
GPIO.output(LIGHT, GPIO.HIGH)现在我们已经开始计算房间里的人数,我们现在正在应用该条件,如果PCount的人数超过0,该条件将启用。因此,当室内人数超过0时,指示灯将亮起
else if PCount = 0:
GPIO.output(LIGHT, GPIO.LOW)同样,如果PCount或室内人数达到0时,灯将关闭
因此,被钉死了!
我们现在已经控制了很多光线。是我们控制风扇和其他空气循环系统的时候了。每当我们谈论风扇或任何其他空气循环装置时,本质上我们谈论的是电机。正如我们之前所了解到的,电机是简单的设备,可以使用电机驱动器轻松控制。但正如你所知,当时我们控制的是直流电机。直流电机是非常简单的设备。但是,当我们谈论家用电器时,这些设备中的大多数将使用交流电或交流电。我假设您必须了解这是什么,以及它与 DC 的区别。
既然您知道我们家庭使用的电机是交流电机,那么您还必须考虑这样一个事实,即它们的控制机制将与直流电机大不相同。如果你这么认为的话,你是对的。然而,电子学的好处是,没有什么是真正困难或复杂的。基本原理基本相同。那么,让我们看看如何在交流电源中控制电机的速度。
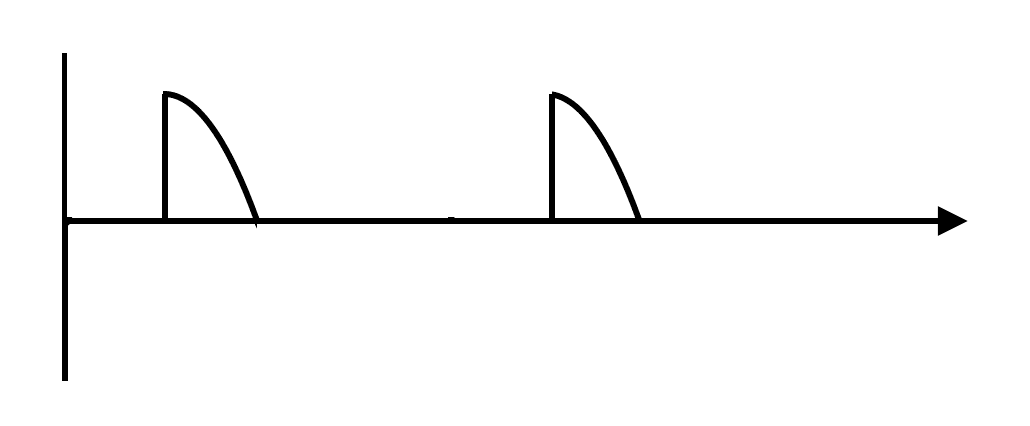
如前所述,我们可以简单地将 PWM 信号发送给直流电机,电机将以 PWM 信号产生的平均电压的速度运行。现在,你一定认为这也适用于交流。问题是,是的,如果你想控制一个灯光或类似的设备,它是可以做到的,在波形失真的情况下,这些设备的特性不会有任何重大变化。然而,当我们谈论任何其他组件时,我们会遇到一个大问题。交流波形如下所示:
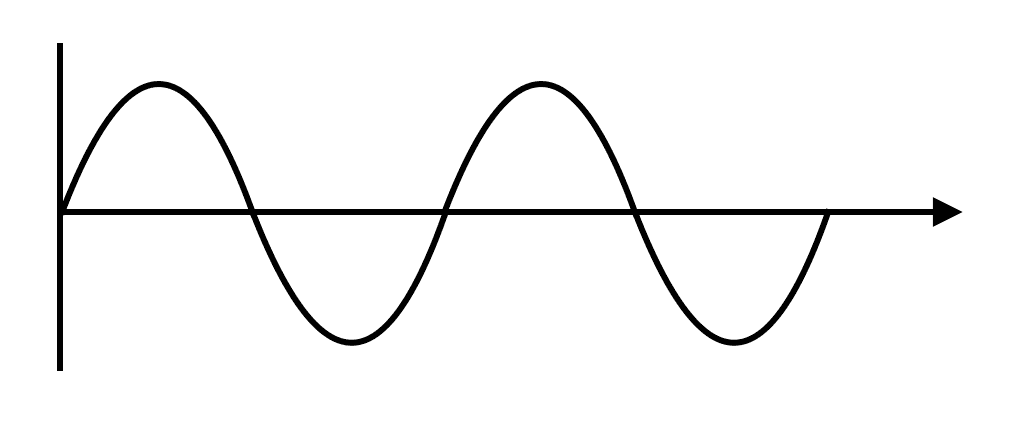
这基本上意味着电势是周期性变化的。在大多数家庭中,这是每秒 50 次。现在,想象一下,如果我们有一个 PWM 控制的设备,它正在切换只允许电源以一定间隔通过的电路。然后,正弦波的不同部分将被传递到最终输出。
正如您在前面的 PWM 中所看到的,幸运的是,PWM 信号与交流电源的相位匹配;但是,因此,只有相位的正端被传输到最终输出,而不是负端。这将对我们的负载造成严重问题,并且连接的设备很可能无法工作。
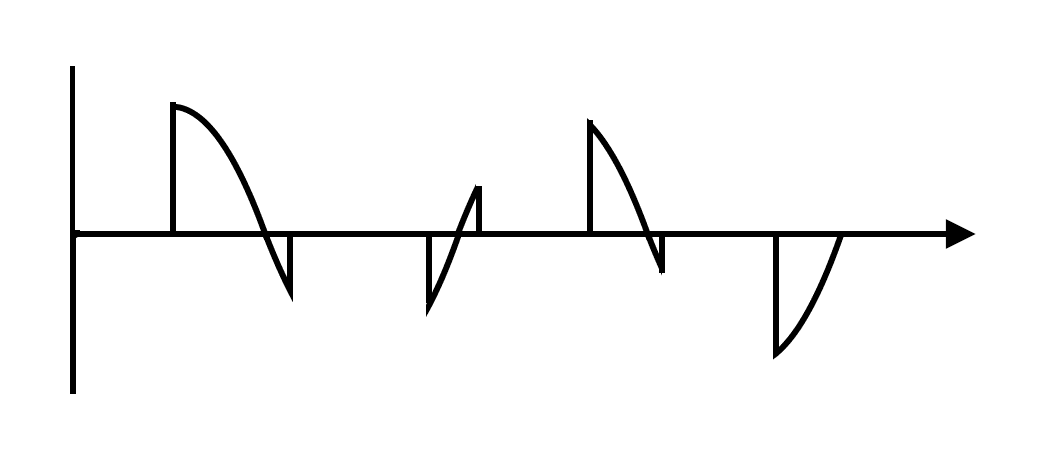
我们还有另一个例子,PWM 是随机的,它让波的随机部分通过。在这一点上,我们可以清楚地看到,任意波的任何部分都被传输,正负端电压不同步,这将再次成为一个巨大的问题。因此,我们不使用 PWM,而是使用一些真正有趣的东西。
最常用的方法称为相位触发控制。有时它也被称为相位角控制或相位切割。它本质上是在相位的某些部分切割波,让波的其余部分通过。困惑的让我在这里向你展示:
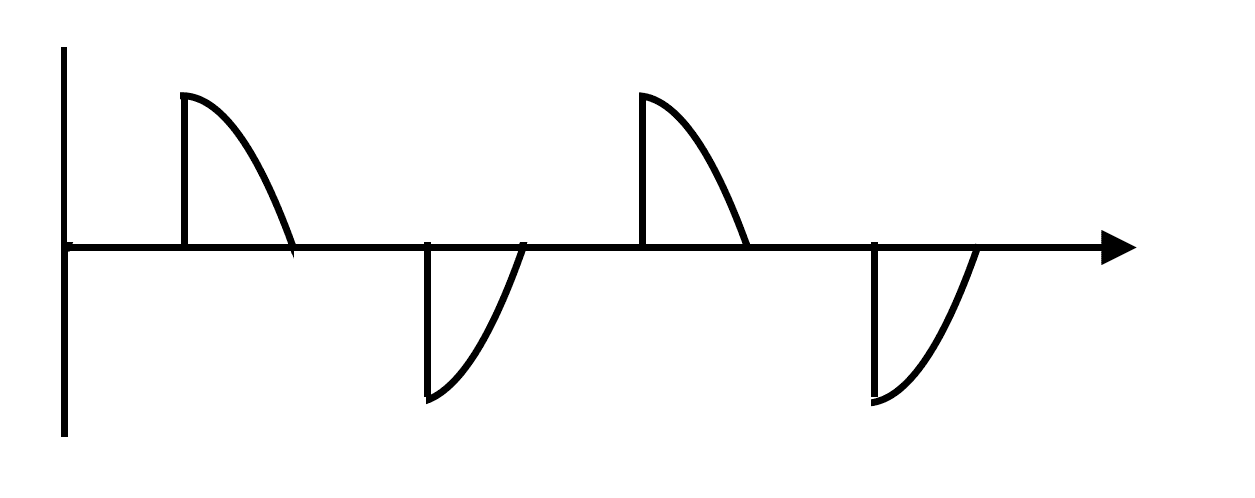
现在,正如你所看到的,交流波的后半部分后面的相位被截断了,并且没有通过最终输出。这使得最终输出仅为总输入的 50%。这项技术的作用是,它保持电源的交流特性,同时仍然能够降低产生的总电压。类似地,正如您在下一张图中所看到的,在 75%的波已经通过之后,波被截断。这导致输出相对较低:
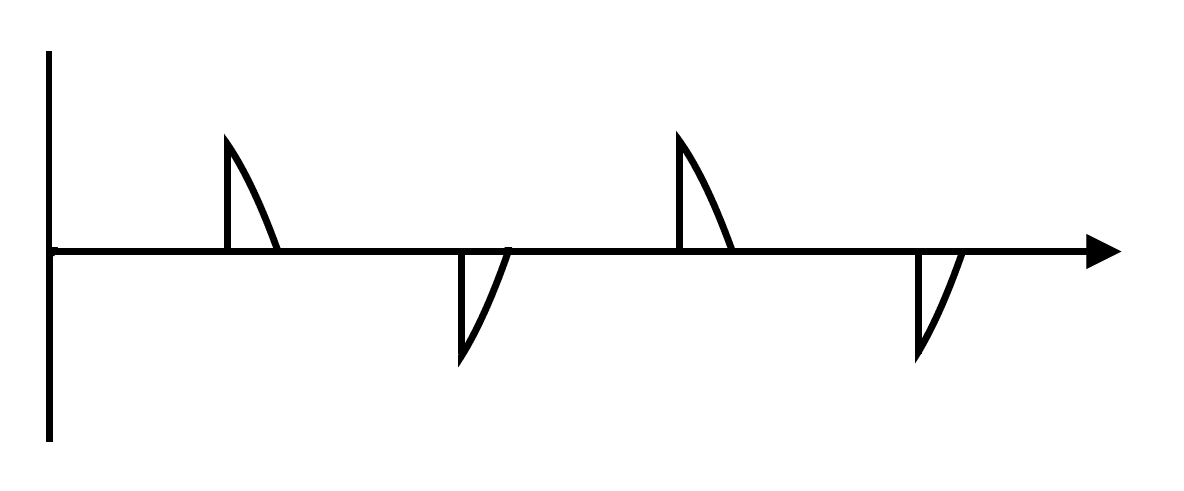
现在你一定在问,我们到底是怎么做的?它由一个相对复杂的电路完成,该电路检测波的相位角,然后打开或控制双向晶闸管,这是一种高功率双向半导体。这会导致电源在特定阶段通过或停止。我们将把这个电路的精确工作留到下一次,因为它相当复杂,与本书无关。
现在说到基本点,我们知道什么是相位切割,我们也知道双向晶闸管是让我们这样做的基本设备。但问题是我们如何使用树莓圆周率来进行测试。
因此,首先,我们需要一个交流调光模块。该模块已经具有相位检测和斩波的所有组件。所以我们需要做的就是用简单的 PWM 控制它。
虽然我可能不必演示如何连接电路或代码应该是什么,但为了理解,让我们使用此模块将灯泡连接到 Arduino,然后控制灯泡。现在,首先要记住的是负载应该是一个灯泡,而不是其他任何东西,比如 LED 灯。因此,继续连接电路,如下图所示:
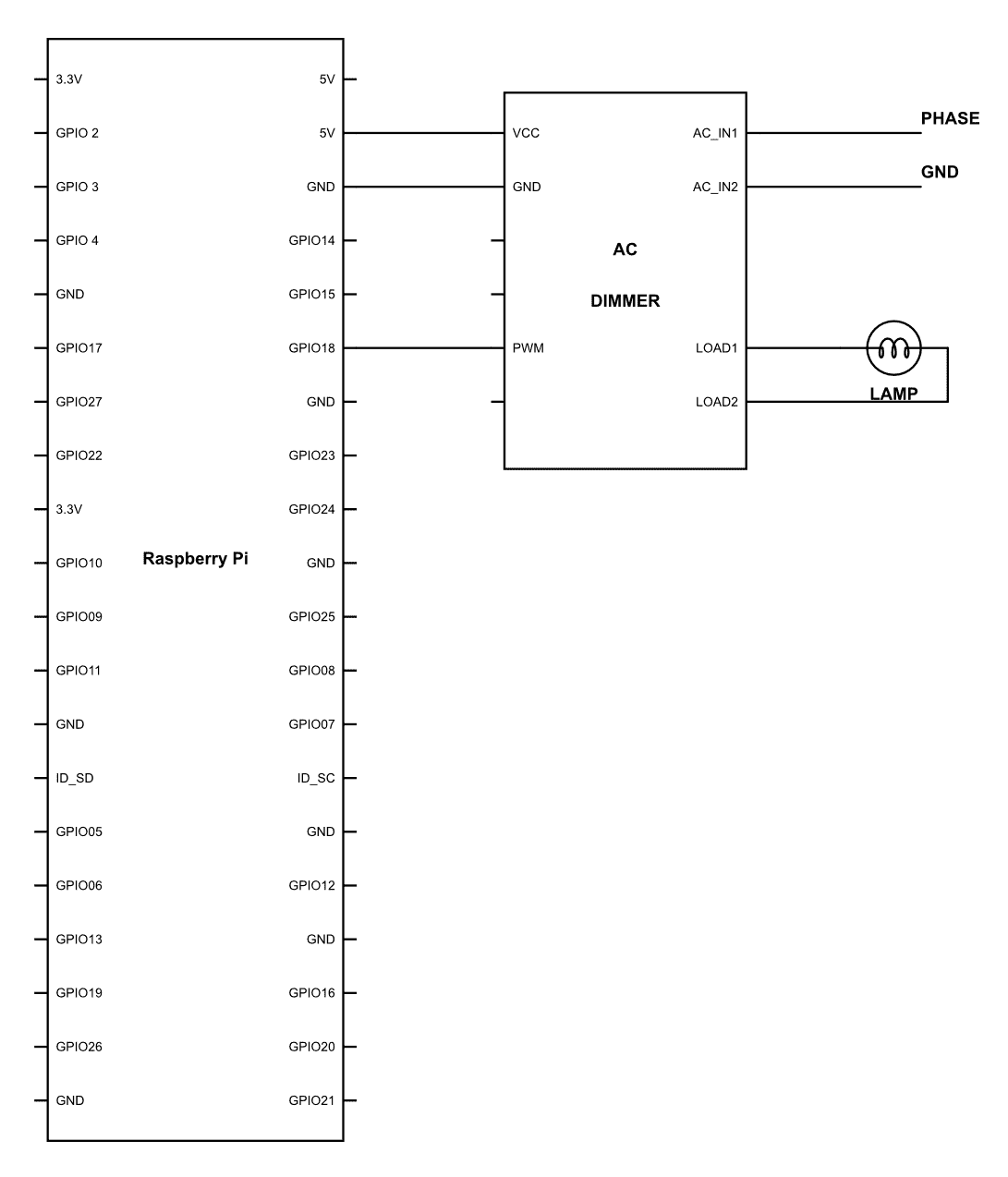
完成后,继续并上载以下代码:
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
GPIO.setup(18,GPIO.OUT)
I = 0
pwm= GPIO.PWM(18,50)
for I < 100:
I = I+1
pwm.start(I)
time.sleep(0.1)
GPIO.cleanup()}正如预期的那样,附加的灯光将首先开始发出非常微弱的辉光,并逐渐增加强度,直到达到 100%。这就是控制如此复杂的过程是多么简单。
既然基本工作已经完成,让我们继续用这个系统做一些有意义的事情。把你的空调设置到完美的温度不是很困难吗?不管你做什么,你最终都会觉得不舒服。这是由于一天中体温的生理变化造成的。
当你醒来时,你的体温相对较低。温度高达 1°F,低于正常体温。随着时间的推移,体温会上升,直到你上床睡觉。一旦你睡着了,你的体温又开始下降,在早上 4:00-6:00 左右达到最低点。这就是为什么当你睡觉时感觉温暖的东西,当你醒来时却很冷的原因。现代空调有一种叫做睡眠模式的东西。它的作用是,它只是在夜间增加温度。这样你在任何时候都不会觉得冷。但话说回来,它的效果如何也是一个问题。
因此,现在我们对机器人技术非常了解,我们将继续制作一个我们自己的系统来处理所有事情
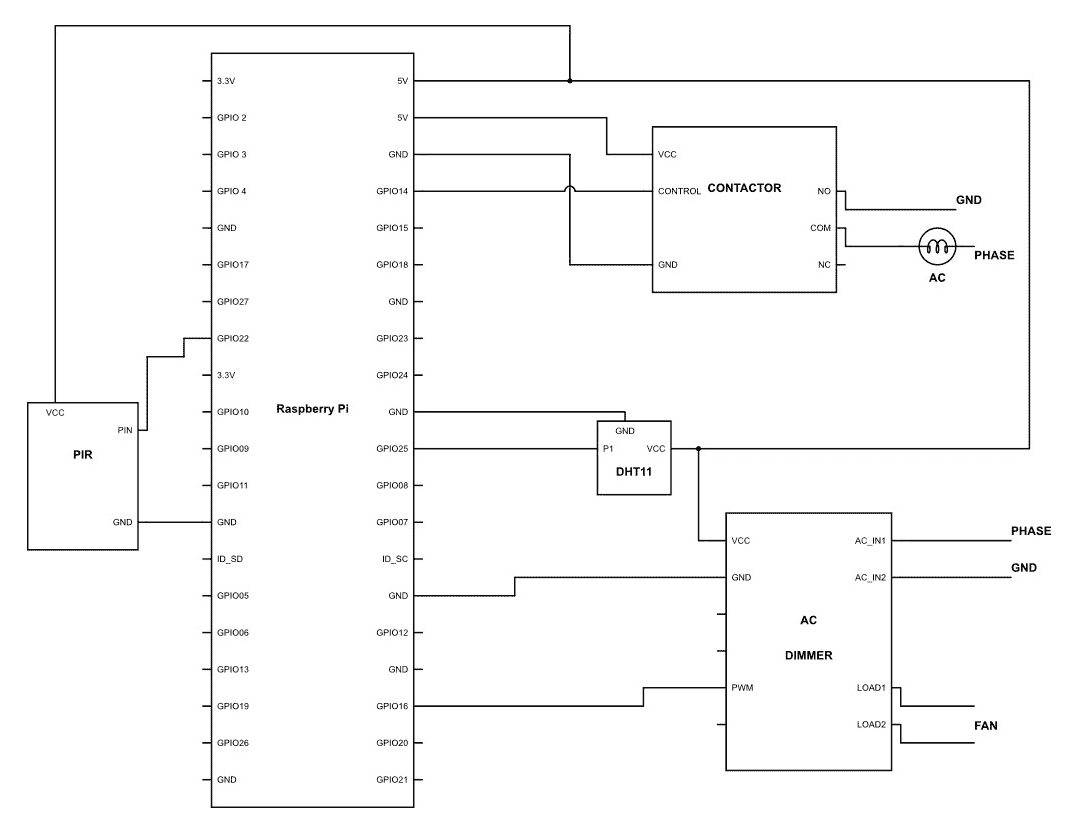
在这一部分中,我们将把空调和风扇连接在一起,这样它们就可以同时工作,让你睡个好觉。现在,在开始之前,我想让你看看接力赛中提到的收视率。正如你所看到的,继电器只能处理 250V 和 5 安培的电流。现在,如果你仔细看一下你的空调小册子,你就会很容易理解为什么我要向你展示所有这些。空调的功耗将远远高于继电器的处理能力。所以,如果你试图用正常的继电器来运行你的空调,那么你最终肯定会弄坏继电器。您的设备有可能比继电器的额定电流低。但是对于任何带有电机的设备,请记住,该设备的初始功耗远高于标称功耗。因此,如果您的空调需要 10 安培的标称电流,那么启动负载可能高达 15 安培。你一定在想,这不是问题,我们为什么不买一个等级更高的继电器呢。嗯,没错!这正是我们将要做的。但电子产品的命名有时会很棘手。处理高功率、高电压机电开关的设备通常被称为承包商而不是继电器。从技术上讲,他们有相同的工作原理;然而,存在结构差异,这在此时不是我们所关心的。因此,我们将使用承包商进行空调切换,并使用调光器进行风扇转速控制。现在已经解决了这个问题,让我们继续连接硬件,如下图所示:

import RPi.GPIO as GPIO
import time
import Adafruit_DHT
GPIO.setmode(GPIO.BCM)
FAN = 18
AC = 17
pwm= GPIO.PWM(18,50)
GPIO.setup(FAN,GPIO.OUT)
GPIO.setup(AC, GPIO.OUT)
while True:
humidity, temperature = Adafruit_DHT.read_retry(sensor, pin)
if temperature =>20 && temperature <=30:
Duty = 50 + ((temperature-25)*10)
pwm.start(Duty)
if temperature <22 :
GPIO.output(AC, GPIO.LOW)
if temperature >= 24
GPIO.output(AC, GPIO.HIGH)}
这里使用的逻辑非常基本。让我们看看它在做什么:
humidity, temperature = Adafruit_DHT.read_retry(sensor, pin)
if temperature =>20 && temperature <=30:
Duty = 50 + ((temperature-25)*10)
pwm.start(Duty)这里我们取humidity和temperature的值。到目前为止还不错,但我们能更进一步,让它更智能吗?前面的逻辑一定帮助你睡得更好,但我们能让它对你来说完美吗?
在我们的身体里有多种指标可以让我们了解身体的状态。例如,如果你累了,你可能不会走得很快或说话声音很大。相反,你会做相反的事情!同样,有多种因素表明我们的睡眠周期是如何进行的。
这些因素包括:体温、呼吸频率、快速眼动睡眠和身体运动。测量准确的体温或呼吸频率以及 REM 睡眠是一项挑战。但是,当我们谈论身体运动时,我认为我们已经完善了它。因此,根据身体运动,我们将感觉到我们睡得有多好,需要什么样的温度调节。
如果你注意到,每当有人在睡觉时开始感到寒冷,身体就会进入胎儿姿势,活动就会少很多。这是自动发生的。然而,当一个人感到舒适时,就不可避免地会有一些动作,比如换侧和手臂或腿的动作。当一个人感到寒冷时,这种情况不会发生。通过这些动作,我们可以判断一个人是否感到寒冷。现在我们已经了解了身体的生理变化,让我们试着围绕它建立一个程序,看看我们能实现什么。
为此,首先,我们需要按如下方式连接电路:
完成后,继续编写以下代码:
import RPi.GPIO as GPIO
import time
import Adafruit_DHT
GPIO.setmode(GPIO.BCM)
FAN = 18
AC = 17
PIR = 22
PIN = 11
Sensor = 4
pwm= GPIO.PWM(18,50)
GPIO.setup(FAN,GPIO.OUT)
GPIO.setup(AC, GPIO.OUT)
while True:
humidity, temperature = Adafruit_DHT.read_retry(sensor, pin)
H = datetime.datetime.now().strftime('%H')
M = datetime.datetime.now().strftime('%M')
if H <= 6 && H <= 22:
if M <=58 :
M = datetime.datetime.now().strftime('%M')
humidity, temperature = Adafruit_DHT.read_retry(sensor, pin)
if GPIO.input(PIR) == 0 :
Movement = Movement + 1
time.sleep(10)
if temperature < 28:
if Movement > 5 :
Duty = Duty + 10
pwm.start(Duty)
Movement = 0
if M = 59 :
if Movement = 0 :
Duty = Duty -10
pwm.start(Duty)
Movement = 0
if temperature <22 :
GPIO.output(AC, GPIO.LOW)
if temperature >= 24 && H <= 6 && H >= 22:
GPIO.output(AC, GPIO.HIGH)
if temperature > 27
pwm.start(100)
for H > 7 && H < 20
GPIO.output(AC, GPIO.LOW)
if H = 20
GPIO.output(AC,GPIO.HIGH)
}让我们看看引擎盖下面发生了什么:
if H <= 6 && H <= 22:
if M <=58 :
M = datetime.datetime.now().strftime('%M')
humidity, temperature = Adafruit_DHT.read_retry(sensor, pin)首先你会看到我们有一个条件:if H,= 6 && H<= 22:。只有当时间范围在上午 10 点到晚上 6 点之间时,这种情况才会出现。这是因为这是我们通常睡觉的时候。因此,只有到了睡觉的时候,这种逻辑才会起作用。
第二个条件是if M <= 58,只有在0和58分钟之间的时间才会为真。因此,当时间为M = 59时,该条件将不起作用。我们将看到有这种逻辑的原因。
此后,我们计算时间并将值存储在一个名为M的变量中。我们还计算湿度和温度值,并将其存储在称为temperature和humidity的变量中:
if GPIO.input(PIR) == 0 :
Movement = Movement + 1
time.sleep(10)
现在,在这一行中,我们正在实现一个条件,如果 PIR 的读数较高,则该条件将为真。也就是说,将检测到一些运动。无论何时发生这种情况,Movement变量将增加1。最后,我们使用time.sleep(10)函数等待10秒。这样做是因为 PIR 可能在一段时间内很高。在这种情况下,该条件将一次又一次地为真,这反过来将使Movement的值增加几倍。
我们增加Movement值的目的是计算人员移动的次数。因此,在一个时间内将其倍数增加将违背目标。
if temperature < 28:
if Movement > 5 :
Duty = Duty + 10
pwm.start(Duty)
Movement = 0现在我们有另一个条件,上面写着if temperature < 28。当条件为真时,不需要太多解释。因此,每当条件为真时,如果Movement的计数数大于5,则Duty的值将增加10。因此,我们将 PWM 发送到交流调光器,从而提高风扇的转速。最后,我们将Movement的值重置为0。
所以本质上,我们只是在计算运动的数量。只有当温度低于 28°C 时,才会计算此移动。如果移动量大于5,则我们会将风扇速度提高 10%。
if M = 59 :
if Movement = 0 :
Duty = Duty -10
pwm.start(Duty)
Movement = 0在上一节中,逻辑仅在时间介于0和58之间时起作用,即计数发生的时间。当M的值为59时,将检查条件if Movement = 0,如果为真,则将Duty的值递减10。这反过来将使风扇转速降低 10%。此外,一旦执行此条件,Movement的值将重置为0。这样,下一个小时就可以开始一个新的循环
现在它的基本意思是计数将按小时进行。如果Movement大于5,则Duty的值将立即增加。但是,如果情况并非如此,则程序将等待直到分钟接近59的值,并且无论何时,它将检查是否有任何移动,在这种情况下,风扇转速将降低。
if temperature <22 :
GPIO.output(AC, GPIO.LOW)
if temperature >= 24 && H <= 6 && H >= 22:
GPIO.output(AC, GPIO.HIGH)
if temperature > 27
pwm.start(100)所有这些代码都非常简单。如果温度低于22,则空调将关闭。此外,如果温度等于或大于24,且时间在晚上 10:00 到早上 6:00 之间,则 AC 将接通。最后,如果温度高于27,则风扇将接通至 100%转速。
for H > 7 && H < 20
GPIO.output(AC, GPIO.LOW)
if H = 20
GPIO.output(AC,GPIO.HIGH)最后,我们通过使用条件for H > 7 && H <20来确保在此期间 AC 始终关闭。此外,如果H = 20,则应打开空调,以便在您准备睡觉之前使房间冷却。
正如您现在所了解的,我们可以根据需要控制任何交流电器。我们已经了解了开关,也完善了改变光强度和风扇速度的方法。但是你注意到一件事了吗?随着我们的系统变得越来越复杂,所需的 GPIO 数量迟早会增加。总有一天,你会希望有越来越多的设备连接到你的树莓 Pi;但是,由于缺少物理端口,您将无法执行此操作。
这是电子学中非常常见的情况。和往常一样,这个问题也有解决办法。这种解决方案称为多路复用器。多路复用器的基本工作是将任何计算机系统中的端口数相乘。现在你一定在想,它是怎么做到的?
这个概念非常简单。让我们首先看一下多路复用器的示意图:
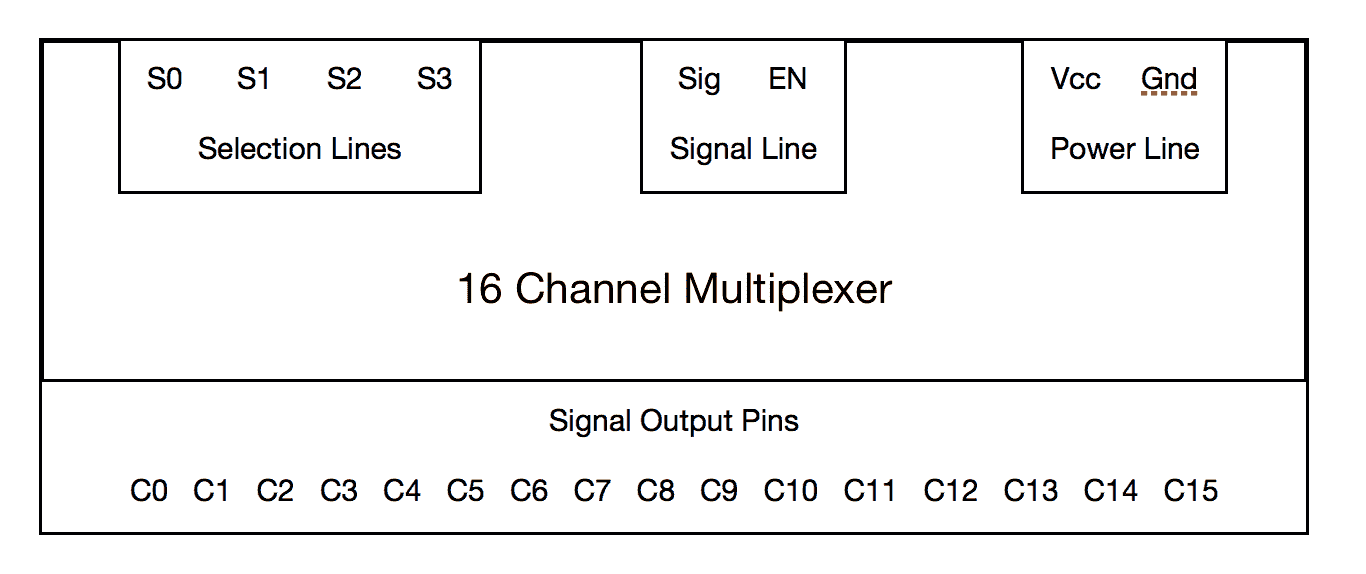
在上图中,您可以看到多路复用器有两个端,一个是信号输出线,另一个与之相反。我们需要了解的第一件事是,多路复用器是一个双向设备,也就是说,它将数据从多路复用器发送到连接的设备,反之亦然。
现在,首先,我们有电源线,这是非常基本的。它是用来给多路复用器本身通电的。然后我们有信号线,它有两个端口,Sig和EN。EN代表启用,这意味着直到EN不高时,数据通信将不会以任何方式发生。然后我们有一个叫做Sig的东西。这是连接到 Raspberry Pi 的 GPIO 进行数据通信的端口。接下来是选择行。如您所见,我们为其提供了四个端口,即,S0、S1、S2和S3。选择行用于选择需要选择的特定端口。下表将阐明具体发生的情况:
| S0 | S1 | S3 | S4 | 所选输出 | | 0 | 0 | 0 | 0 | C0 | | 1. | 0 | 0 | 0 | C1 | | 0 | 1. | 0 | 0 | C2 | | 1. | 1. | 0 | 0 | C3 | | 0 | 0 | 1. | 0 | 补体第四成份 | | 1. | 0 | 1. | 0 | 碳五 | | 0 | 1. | 1. | 0 | C6 | | 1. | 1. | 1. | 0 | C7 | | 0 | 0 | 0 | 1. | C8 | | 1. | 0 | 0 | 1. | C9 | | 0 | 1. | 0 | 1. | C10 | | 1. | 1. | 0 | 1. | C11 | | 0 | 0 | 1. | 1. | C12 | | 1. | 0 | 1. | 1. | C13 | | 0 | 1. | 1. | 1. | C14 | | 1. | 1. | 1. | 1. | C15 |
在上表中,您可以看到,通过在选择行上使用各种逻辑组合,可以寻址各种行。比如说,我们在选择管脚上有以下序列-S0=1、S1=0、S2=1、S3=1。如果这是 Raspberry Pi 选择管脚上的输入,则将选择管脚编号 C13。这基本上意味着现在 C13 可以与多路复用器的引脚Sig进行数据通信。此外,我们必须记住,enable 引脚必须高,才能进行数据传输。
以类似的方式,我们可以继续处理多路复用器的所有 16 个引脚。因此,如果我们从逻辑上看,那么通过使用六个 Raspberry Pi 引脚,我们可以继续使用 16 个 GPIO。现在我们已经了解了多路复用的基本原理,让我们继续尝试使用其中一种。

连接硬件后,让我们继续上传以下代码:
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
S0 = 21
S1 = 22
S2 = 23
S3 = 24
GPIO.setup(S0,GPIO.OUT)
GPIO.setup(S1,GPIO.OUT)
GPIO.setup(S2,GPIO.OUT)
While True:
GPIO.output(S0,1)
GPIO.output(S1,0)
GPIO.output(S2,1)
GPIO.output(S4,1)
time.sleep(1)
GPIO.output(S0,1)
GPIO.output(S1,1)
GPIO.output(S2,1)
GPIO.output(S4,1)
time.sleep(1)
GPIO.output(S0,1)
GPIO.output(S1,0)
GPIO.output(S2,0)
GPIO.output(S4,1)
time.sleep(1)
'GPIO.output(S0,0)
GPIO.output(S1,0)
GPIO.output(S2,0)
GPIO.output(S4,1)
time.sleep(1)
GPIO.output(S0,0)
GPIO.output(S1,1)
GPIO.output(S2,0)
GPIO.output(S4,1)
time.sleep(1) }在这里,我们实际上是在一个接一个地触发选择线,以寻址 LED 连接的每个端口。无论何时,与之对应的 LED 都会发光。另外,它发光的原因是信号端口Sig连接到 3.3V 的树莓 Pi。因此,将逻辑高电平发送到它所连接的任何端口。
这是多路复用器工作的基本方式之一。当我们使用多个设备和传感器时,这会非常有用。
在本章中,我们使 Jarvis 能够在不同条件下自动化您的家用电器,并将各种属性应用于系统。因此,继续尝试许多其他场景,在这些场景下,您可以增强您的家庭自动化系统。
在下一章中,我们将启用 Jarvis 物联网,从而使用 Wi-Fi 和互联网从您的手机控制设备。